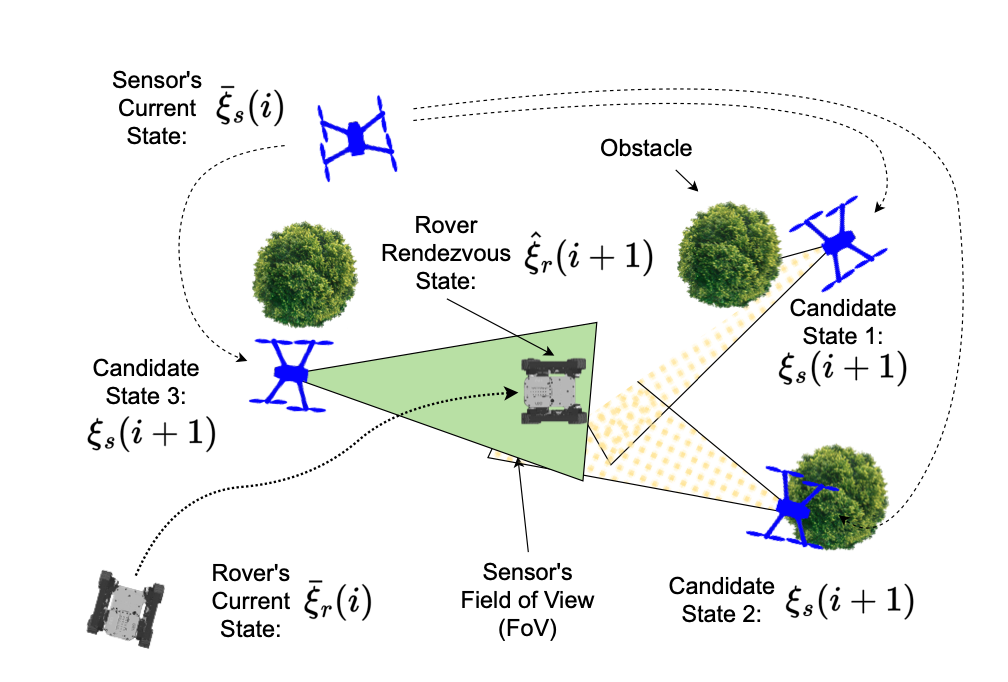
A real-world problem that could affect payload-delivering robots is that their sensors may be damaged, impaired, or otherwise cease functioning. Our approach to this problem was to find a way for a quadrotor drone to track and help navigate the rover around obstructions. The algorithm used a probabilistic neural network that determined the states for the drone that would avoid obstacles and occlusions to the rover. Additionally, the network determined the optimal state that minimized the rover’s predicted posterior localization uncertainty, which we could calculate using Kalman Filtering equations.
I constructed a simulated environment for the rover-drone setup and integrated a local and global planner for the drone, enabling it to navigate around obstacles in the simulated environment. Our experiments showed improved speed and reduced uncertainty compared to other methods (brute force or heuristic). This research was accepted to the MRS 2023 conference.