Over Summer 2023, I worked at NASA Jet Propulsion Laboratory as a robotics intern. My job was to assist with a project involving a tele-operated mine rover designed for search and rescue missions. Specifically, I worked on the software for some of the systems and sensors on that system. Some of these sensors included the Inertial Measurement Unit (IMU), and cameras.
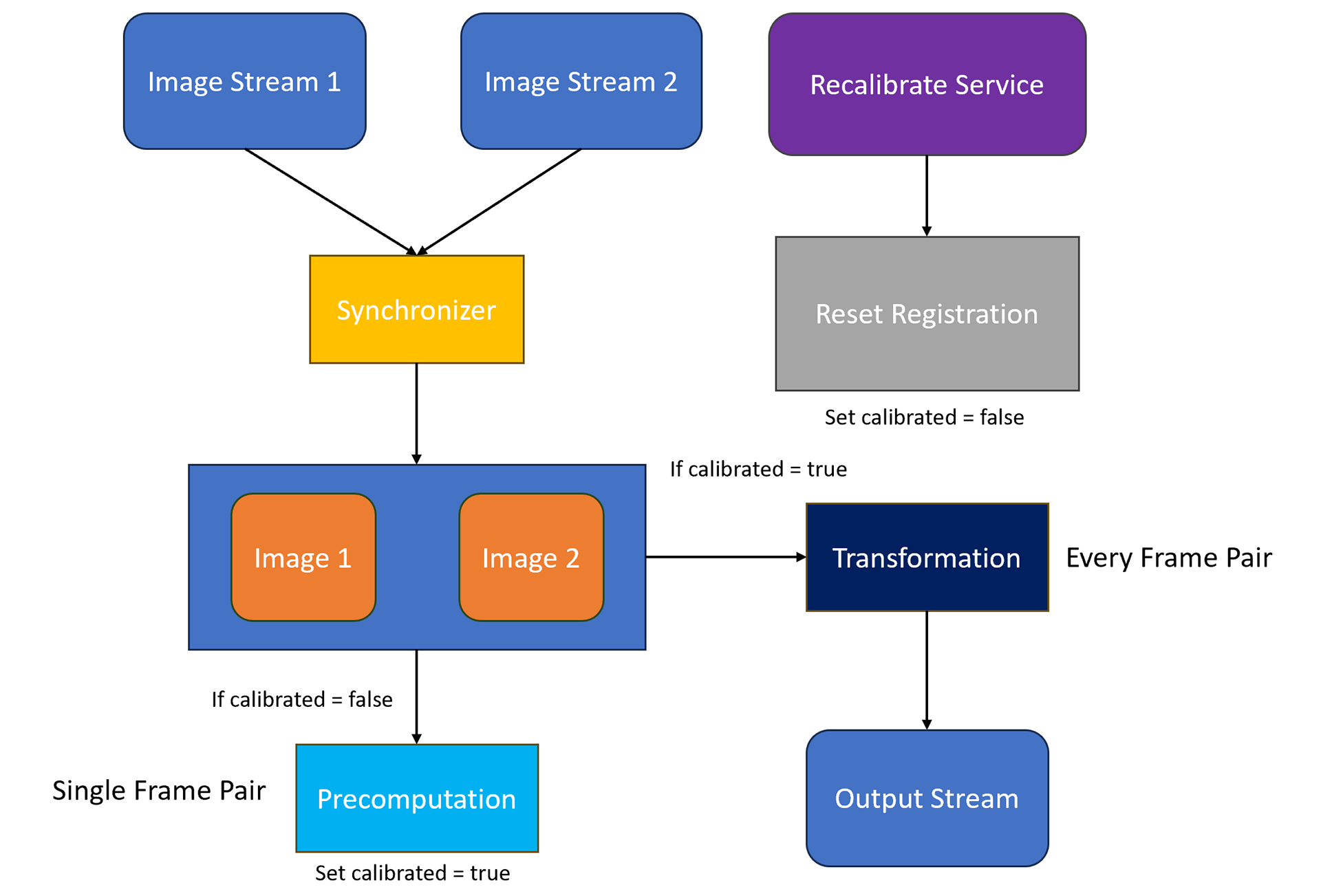
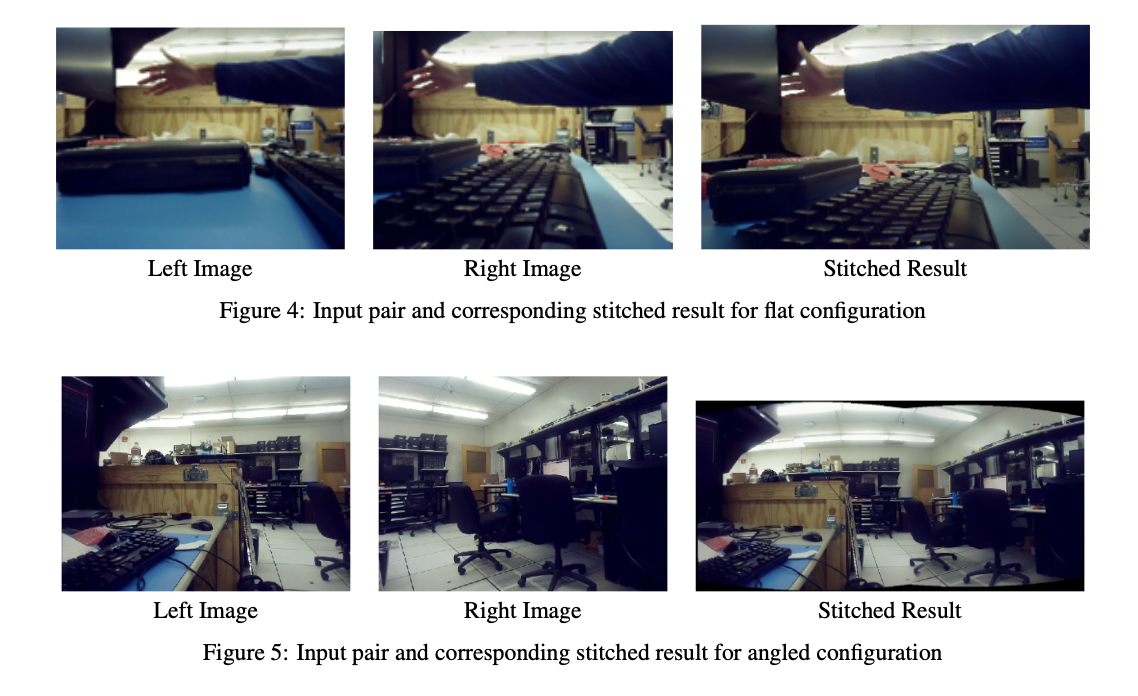
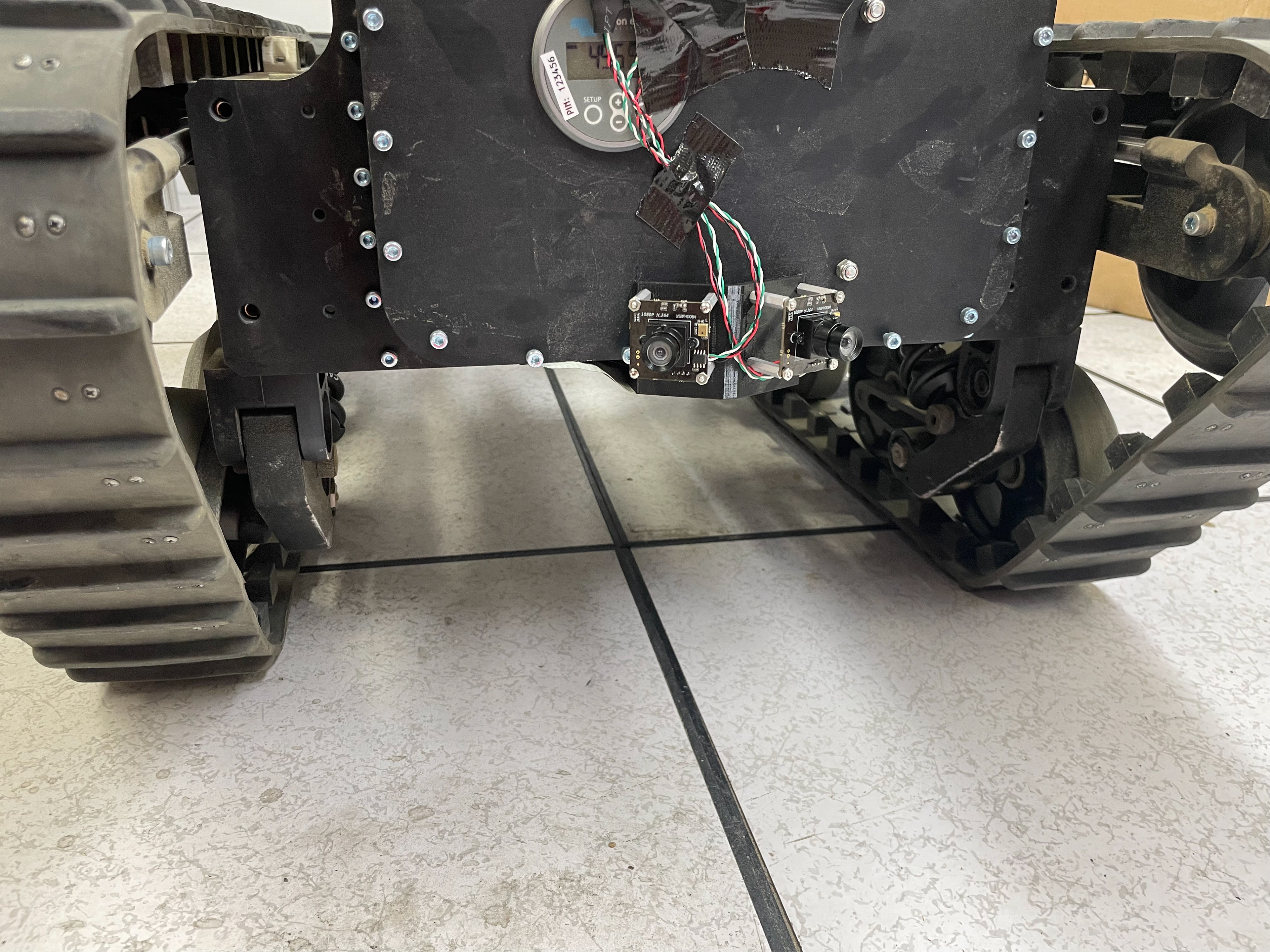
My project focused around a computer vision system for the mine rover. To assist in its operation, I synchronized several cameras onboard the robot and produced a real-time panorama for the robot operators to receive a full view of the scene. On the right you can see two camera views and their respective panoramic outputs. I wrote a paper on the pipeline I created for this process. In addition, using the measurements from the IMU and camera, I was able to display a point cloud, or a collection of points in 3D space of the mine rover to map its surroundings and localize it.
This research project is an example of my work in computer vision and robotics. My experience in this field led me to develop real software for robotics applications that are going out in the world. Furthermore, this research project required me to display my skills in C++, Python, and the Robotic Operating System to produce a production-ready system. On that topic, I had to organize and submit my code so that it was ready to deploy and test on a real robot.