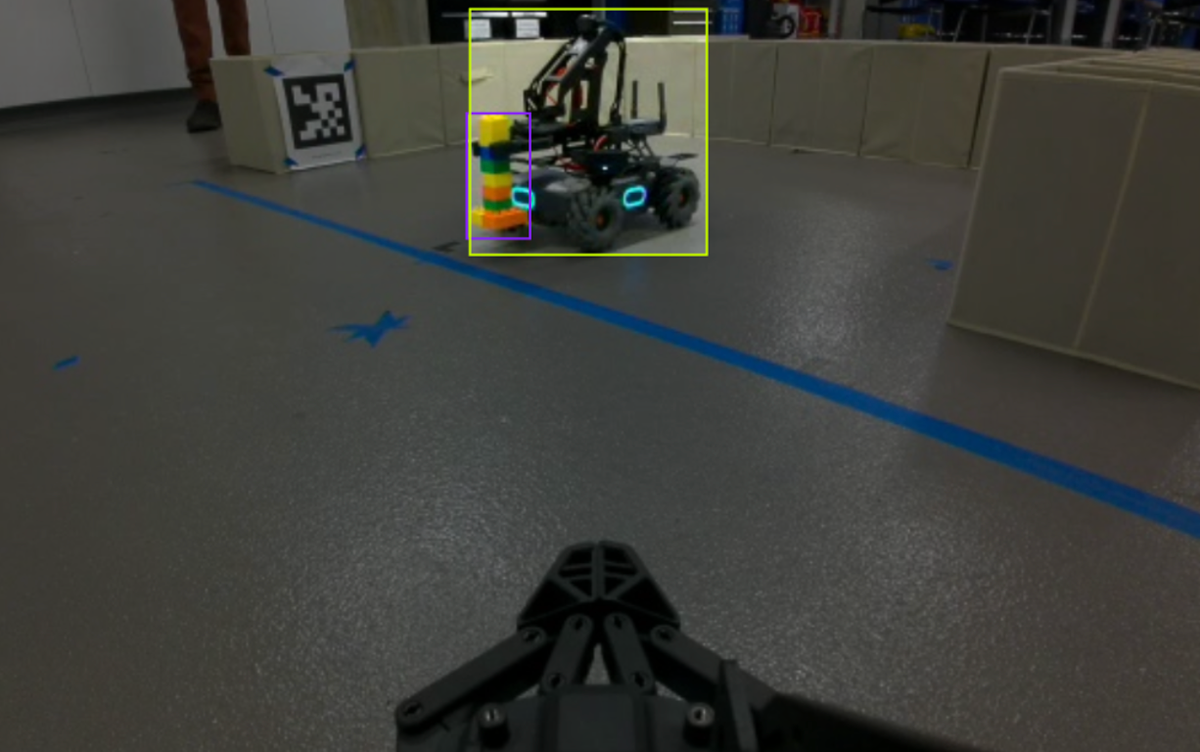
The purpose of this project is to enable two robots to autonomously grab, pass, and place a lego piece onto a target. One robot (robot 1) is confined by a stack of boxes and a blue line. This robot must locate and pick up a lego piece and pass it to another robot (robot 2), which is located beyond the blue line. This robot then takes the lego and drops the lego piece onto a red target. Throughout the run, neither robot can drop the lego block on the floor, nor can they pass the blue line.
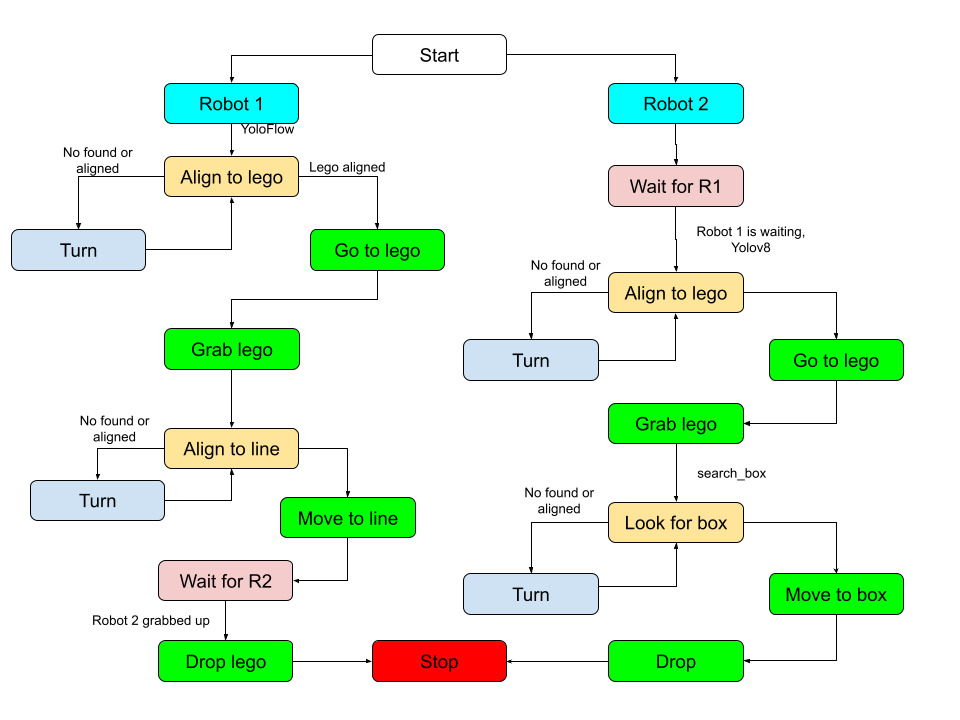
We re-trained the YOLOv8 model to locate the robots and the lego pieces. Robot 1 uses this model to locate the lego initially, and then uses standard HSV thresholding with line detection to locate and align itself with the blue line. Robot 2 uses the same model to locate the lego piece and take it from robot 1, and then it uses HSV thresholding and blob detection to locate the goal.
Our cooperative algorithm succeeded in handing off the block at a rate of 90% and delivered the blocks to the goal at a rate of 77%.